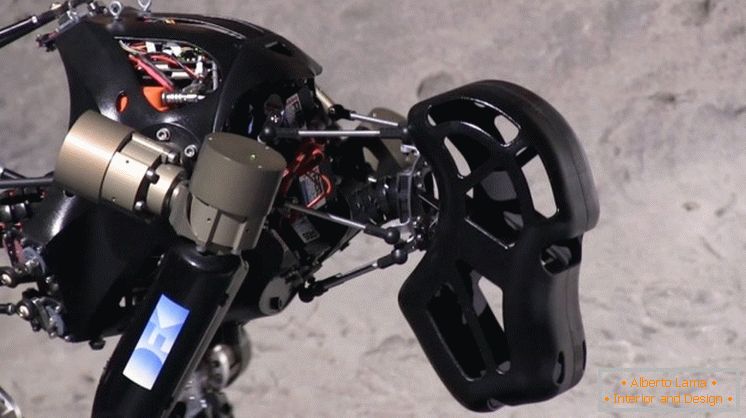
Германскиот истражувачки центар за вештачка интелигенција (DFKI) и Универзитетот во Бремен работат на simian робот iStruct Demonstrator, тој е класифициран како "вселенски робот". Сега механичките мајмуни поминуваат тестови за одење и рамнотежа во услови близу до релјефот на Месечината.

Студијата за опасни лудни површини бара употреба на различни форми на движење, а истражувачите од DFKI ги проучуваат своите способности (вклучувајќи комбинација на нозе, тркала и гасеници). Роботите слични на мајмуните имаат одредени предности во споредба со тркала, со четири точки поддршка ви овозможува да креирате постабилна положба кога се качувате низ препреки или ридски терен. Роботот може да се балансира на задните нозе за да ги ослободи предните колена за да изврши некоја акција.

Со нови меѓународни интереси во лунарната мисија, постои можност iStruct (или еден од неговите потомци) да можат да ја посетат месечината. Колонизацијата на Месечината од страна на роботите ќе започне со развој кој може да се развие и разумно да реагира во секоја сегашна ситуација. Во овој поглед, целта на проектот е да се изгради "напредна вештачка интелигенција" и роботски систем кој може да учи и да се движи околу себе.
Роботот има шарки со шарки што го поврзуваат багажникот и карлицата, давајќи му поголема флексибилност, како и сензорот за оптоварување за ногата и глуждот што реагираат кога се во контакт со земјата.
Други карактеристики вклучуваат:
- 43 независни мотори;
- Шест дополнителни FSR сензори на отворени делови кои се користат за откривање на препреки;
- 6-оски сензор за вртежен момент;
- Дигитален 3-оски акцелерометар, за да ја согледа ориентацијата на ногата во вселената;
- Два температурни сензори за компензирање на температурните промени во електрониката;
- Дигитален магнетски сензор за аголна контрола на секоја подвижна оска на ногата и зглобот на зглобовите;
Повеќето роботи веќе содржат многу од овие сензори, но артикулираниот iStruct 'рбет (кој може да функционира како 6-оски вртежен момент) е вид на реткост за локомоторните роботи кои помагаат при движење на сите четири лица. Сензорите во подножјето и зглобовите на зглобовите ќе му овозможат да го одржува рамнотежата на наклонета површина.
Во 2008 и 2009 година, дипломиран инженер Даниел Кун работел на сличен робот. Мал мајмун кој беше способен за едноставно четириножно одење. По овој проект, тој почна да работи на iStruct, кој има голем број значајни ажурирања. Ова е многу поголема тежина, 18 кг и димензии 66 х 43 х 75 см, а исто така содржи 26 степени на слобода и се напојува со различни електрични мотори. Проектот треба да биде завршен во август оваа година.
Можете да видите како тој ги користи неговите интелектуални нозе и глуждовите при одење и одржување на рамнотежата во видеото подолу. Ова е мал чекор за мајмун робот, но потенцијално огромен скок за сите роботики на сличен дизајн.
Одење
Балансирање
Фотогалерија Вкупно | 14 слики